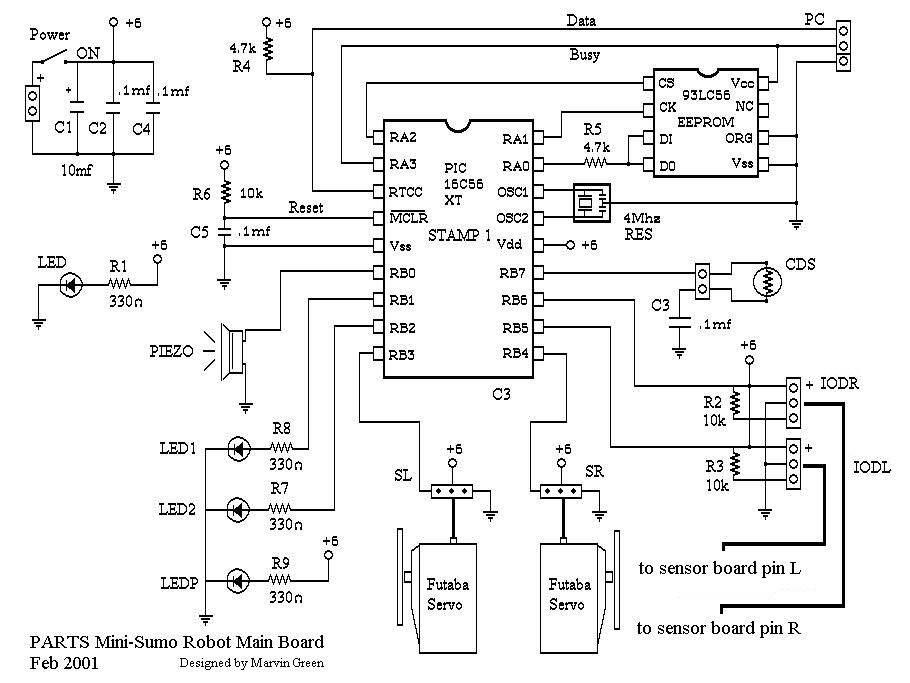
 How To Build the PARTS Mini-Sumo Robot Mark II
How To Build the PARTS Mini-Sumo Robot Mark II
How To Build the PARTS Mini-Sumo Robot Mark II
Spring 2001
"If you have all the parts, you should be able to complete this robot in a weekend."
PARTS Mini-Sumo Robot Mark II Kits are Sold OutOctober 16, 2001 We have sold out of the kits for this year. Thanks to Warren Leach for
selling the kits, Pete Skeggs for getting the parts, Daryl Sandberg for
designing and hand-forming the chassis and wheels, Marvin Green for designing
the low-cost sensor board, ECD / PCB
Express for donating 63 free printed circuit boards, and many others
for kitting them up. Mini-Sumo Kit Construction GuideThe directions for building the Mark II kit have some mistakes, and there are differences between the HTML and PDF versions.
Now available in Adobe Acrobat format: http://www.bluesky.com/warren/minisumo.pdf |
{kind=link}
{kind=link}
{kind=link}